뉴욕대, 인간 뇌-신체 구조 모방한 로봇 제어 알고리즘 "브레인바디-LLM" 개발
 하이커뮤니티매니져
0
3
11:55
하이커뮤니티매니져
0
3
11:55
‘어드밴스드 로보틱스 리서치’에 연구 논문 발표
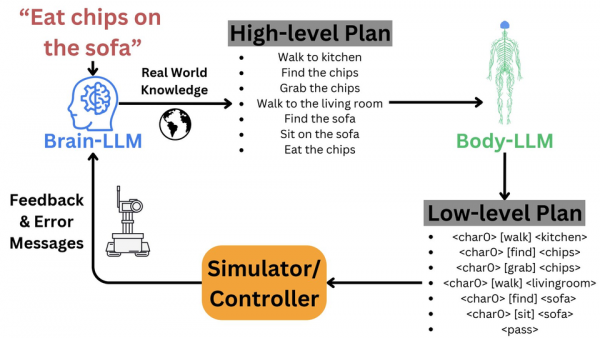
▲‘브레인바디-LLM’의 개념
뉴욕대(NYU) 연구팀이 대규모언어모델(LLM)을 활용해 로봇 동작을 계획·수행하는 새로운 알고리즘을 개발했다고 테크엑스플로어가 보도했다.
뉴욕대 연구팀은 인간의 뇌와 신체가 동작을 조율하는 방식을 모방한 새로운 알고리즘인 ‘브레인바디(BrainBody)-LLM’을 개발하고, 연구 성과를 전문 학술지인 ‘어드밴스드 로보틱스 리서치(Advanced Robotics Research)’에 발표했다. (논문 제목:Grounding Large Language Models for Robot Task Planning Using Closed-Loop State Feedback)
연구팀은 최근 로봇 분야에서 활용이 늘고 있는 LLM이 실제 환경에서 인간의 행동을 이해하는 능력이 뛰어나다는 점에 주목했다. 이에 LLM이 제한된 로봇 제어 명령에 접근할 수 있도록 설계해, 사용자의 명령를 기반으로 로봇 정책을 생성·수정하는 방식을 구현했다.
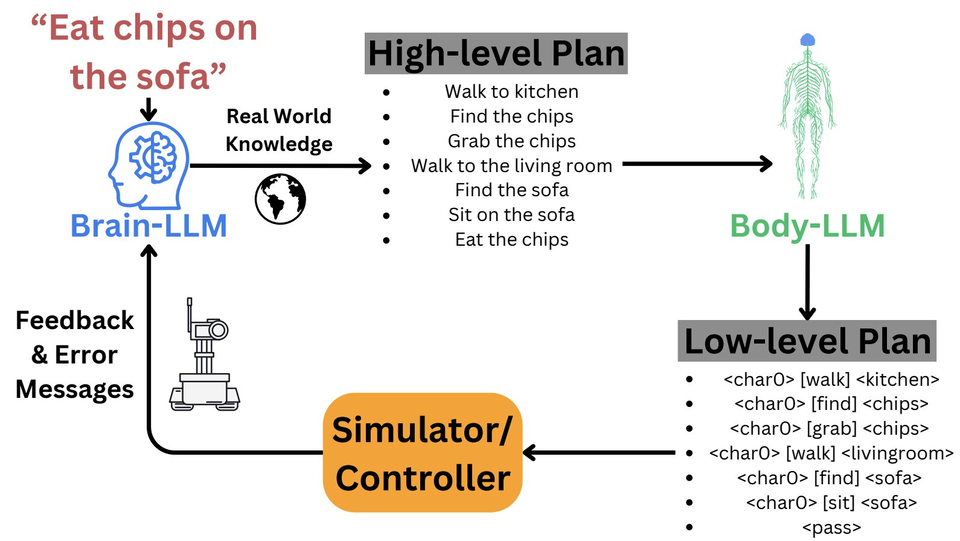
브레인바디-LLM은 ‘브레인 LLM’과 ‘바디 LLM’ 두 개의 모듈로 구성된다. 브레인 LLM은 고수준 작업을 계획해, 이를 소단위 단계로 분해하며, 바디 LLM은 각 단계에 필요한 세부 제어 명령을 생성해 로봇이 실제 동작을 수행하도록 한다.
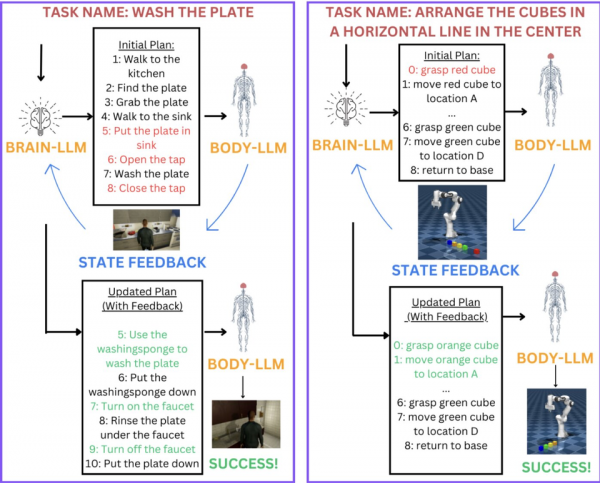
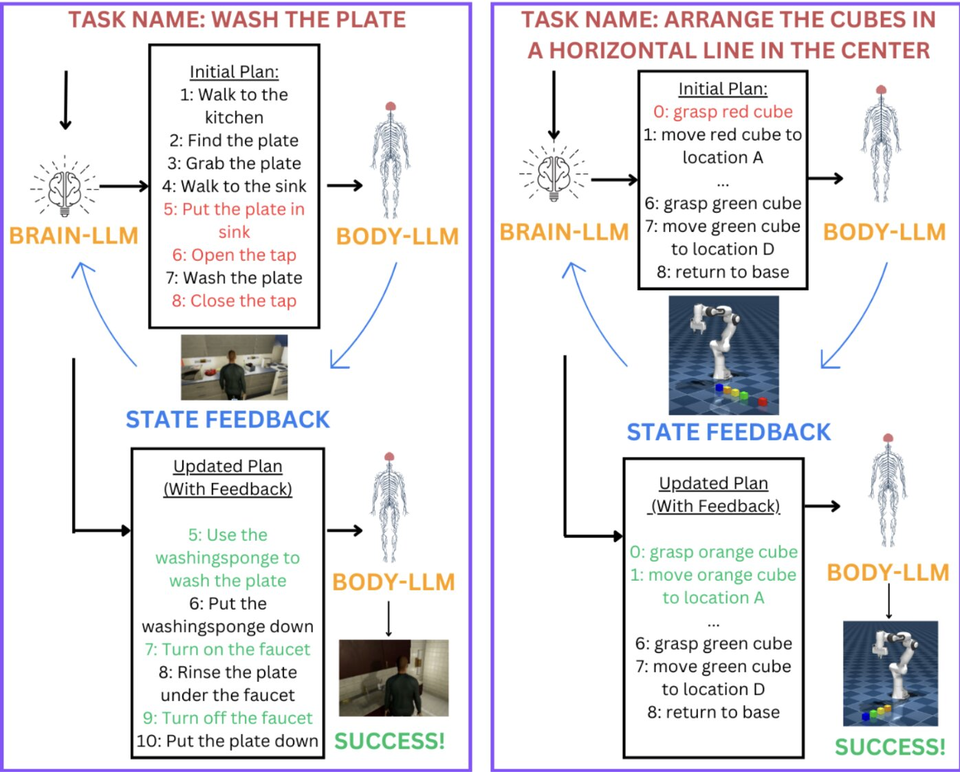
여기에 ‘폐쇄형 피드백(closed-loop feedback)’ 메카니즘을 적용해 로봇의 동작 결과와 환경 변화를 실시간으로 분석하고 오류를 자동으로 수정하도록 설계했다. 연구팀은 폐쇄형 피드백 메카니즘이 복잡한 작업에서도 높은 안정성을 확보하는 데 기여한다고 설명했다.
연구팀은 시뮬레이션 플랫폼인 ‘버추얼홈(VirtualHome)’과 ‘프랑카 리서치 3(Franka Research 3)’ 로봇 팔을 활용해 알고리즘을 검증했다. 브레인 바디-LLM을 적용한 결과, 기존 최신 모델 대비 작업 완수율이 17% 향상됐으며, 현실 실험에서도 평균 84%의 성공률을 기록했다.
▲'브레인바디(BrainBody)-LLM’ 작동 원리. (이미지=NYU)
연구팀은 “LLM을 이용한 로봇·에이전트 시스템들은 대부분 비슷한 방식으로 작동한다. 여러 개의 LLM이 서로 대화하듯 연결되어 외부 도구를 사용하면서, 사람이 던지는 수학 문제를 해결하거나 심층 분석과 같은 복잡한 인간의 요구에 대응한다”고 말했다.
연구팀은 향후 3D 비전, 심도 센서, 관절 제어 등 다양한 모달리티를 LLM과 결합해 로봇이 보다 인간과 유사한 동작과 작업 수행 능력을 갖추도록 연구를 확대할 계획이다. 브레인바디-LLM이 여러 로봇 플랫폼에 적용돼 실환경에서 더 복잡한 작업을 수행할 수 있을 것으로 기대하고 있다.
백승일 기자 [email protected]
https://www.irobotnews.com/news/articleView.html?idxno=43863&page=2&total=40396
토토하이, 토토하이먹튀신고, 토토힌먹튀사이트, 토토하이먹튀검증사이트, 토토하이먹튀없는사이트, 토토먹튀, 먹튀토토, 토토하이먹튀예방, 토토하이먹튀제보, 토토하이먹튀확인, 토토하이먹튀이력조회, 먹튀피해, 토토하이먹튀검증업체, 토토하이먹튀사이트검증, 토토하이먹튀공유, 토토하이먹튀사이트목록, 토토하이먹튀리스트, 토토하이안전공원, 토토하이안전놀이터, 토토하이안전사이트, 토토하이검증사이트
Comments
 종목별 팀순위
종목별 팀순위
-
순위 팀 경기 승 무 패 승점 1  리버풀
리버풀
19 12 6 1 42 2  아스널
아스널
18 12 4 2 40 3  애스턴 빌라
애스턴 빌라
19 12 3 4 39 4  토트넘
토트넘
18 11 3 4 36 5  맨시티
맨시티
17 10 4 3 34 6  맨유
맨유
19 10 1 8 31 7  웨스트햄
웨스트햄
18 9 3 6 30 8  뉴캐슬
뉴캐슬
19 9 2 8 29 9  브라이튼
브라이튼
18 7 6 5 27 10  본머스
본머스
18 7 4 7 25 11  첼시
첼시
18 6 4 8 22 12  울버햄튼
울버햄튼
18 6 4 8 22 13  풀럼
풀럼
19 6 3 10 21 14  브렌트포드
브렌트포드
17 5 4 8 19 15  크리스탈 팰리스
크리스탈 팰리스
18 4 6 8 18 16  노팅엄 포레스트
노팅엄 포레스트
19 4 5 10 17 17  에버턴
에버턴
18 8 2 8 16 18  루턴
루턴
18 4 3 11 15 19  번리
번리
19 3 2 14 11 20  셰필드
셰필드
19 2 3 14 9
- 12.14 [미국 NBA] 2025년12월15일 피닉스 선즈 vs LA 레이커스 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 시카고 불스 vs 뉴올리언스 펠리컨스 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 미네소타 팀버울브스 vs 새크라멘토 킹스 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 애틀랜타 호크스 vs 필라델피아 세븐티식서스 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 브루클린 네츠 vs 밀워키 벅스 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 클리블랜드 캐벌리어스 vs 샬럿 호네츠 분석 중계
- 12.14 [미국 NBA] 2025년12월15일 인디애나 페이서스 vs 워싱턴 위저즈 분석 중계
 프리미엄카지노총판
프리미엄카지노총판 실버스틸
실버스틸 킹덤sms
킹덤sms 리딕션미
리딕션미