MIT·스탠포드 연구팀, 덩굴 식물 모방 "소프트 로봇 그리퍼" 개발
 하이커뮤니티매니져
0
1
09:58
하이커뮤니티매니져
0
1
09:58
무겁고 깨지기 쉬운 물체 이송 최적화…과학 저널 ‘사이언스 어드밴시스'에 논문 발표
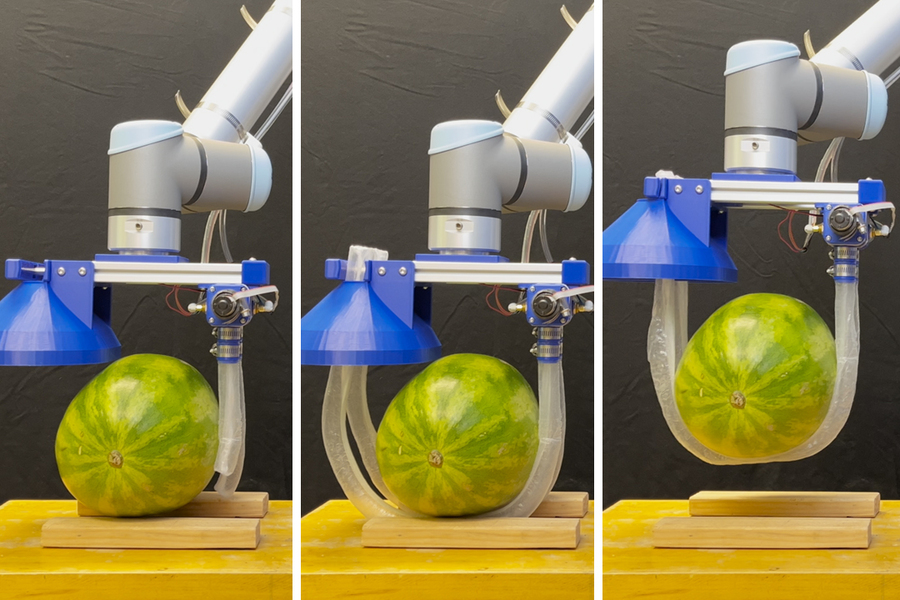
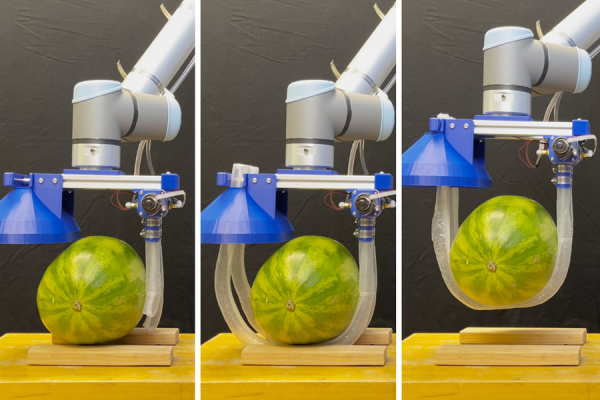
▲연구팀은 덩굴 로봇이 수박과 같은 무겁고 깨지기 쉬운 다양한 물체를 안전하고 안정적으로 들어 올릴 수 있음을 입증했다.(사진=MIT 뉴스)
MIT와 스탠포드대 공동 연구팀이 덩굴 식물처럼 자라나 물체를 부드럽게 감싸안아 들어 올릴 수 있는 ‘소프트 로봇 그리퍼’를 개발했다고 MIT 뉴스가 10일(현지시간) 보도했다. 공기압 튜브를 활용해 ‘개방형’과 ‘폐쇄형’ 루프 방식을 결합한 이 로봇은 깨지기 쉬운 물건이나 거동이 불편한 환자까지 안전하게 이송할 수 있을 것으로 기대된다.
연구팀은 이번 연구 성과를 과학 저널 ‘사이언스 어드밴시스(Science Advances)’에 발표했다.(논문 제목: Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps)
이 소프트 그리퍼는 딱딱한 기계 손가락이나 집게 대신, 공기압으로 부풀어 오르는 유연한 튜브를 활용한다. 잡고자 하는 물체 근처에 있는 압력 상자에서 튜브가 마치 양말이 뒤집히듯 밖으로 자라난다. 이 ‘로봇 덩굴’은 좁은 틈새나 복잡한 장애물을 뱀처럼 통과해 목표물에 접근할 수 있다. 물체 주위를 휘감은 덩굴이 다시 상자로 돌아와 결합하면, ‘해먹’이나 ‘슬링(Sling)’처럼 물체를 안정적으로 들어 올릴수 있다.
연구팀은 이 로봇이 수박이나 유리 꽃병처럼 둥글고 깨지기 쉬운 물체를 비롯해 금속 막대 더미나 유아들의 놀이용 공 등 다양한 형태의 물체를 안전하게 파지할수 있다고 밝혔다.
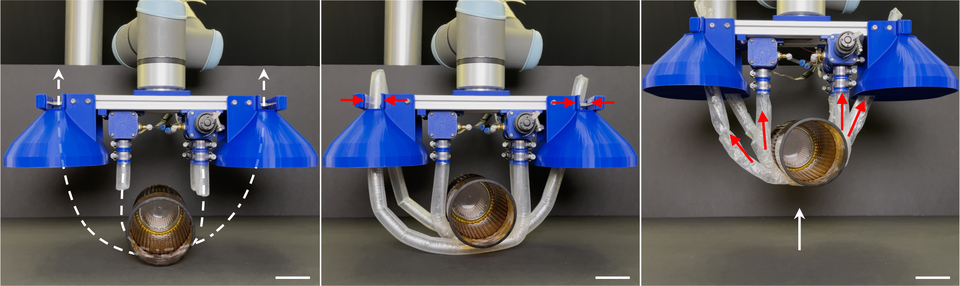
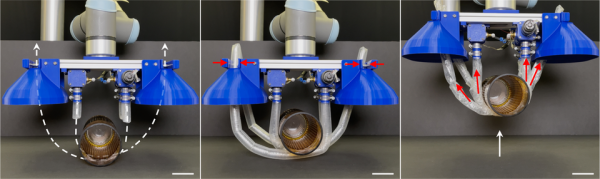
▲덩굴이 확장됨에 따라 덩굴은 물체 주위를 비틀고 감긴 후 상자 쪽으로 다시 돌아가 자동으로 제자리에 고정되면서 물체를 지탱한다. (사진=MIT 뉴스)
연구팀은 이 소프트 그리퍼 개발을 위해 ‘개방형 루프(Open-loop)’ 방식과 ‘폐쇄형 루프(Closed-loop)’를 결합했다.
기존의 덩굴 로봇은 한쪽 끝만 뻗어 나가는 ‘개방형’이어서 새로운 공간이나 물체를 탐색하는 데는 유리했지만 실제로 무거운 물체를 지탱하는 데는 한계가 있었다. 연구팀은 이를 개선하기 위해 덩굴이 물체를 감싼 뒤 다시 원점으로 돌아와 연결되는 ‘폐쇄형’ 구조를 도입했다. 폐쇄형 루프 방식을 채택함에 따라 무거운 물체도 감싸 지탱할 수 있게 된 것이다.
이 기술은 노인 간병 시설의 환자 이송에 활용할 수 있다. 예를 들어 거동이 불편한 환자를 침대에서 휠체어로 옮기는 작업은 간병인에게 극심한 육체적 부담을 주는 데 기존 리프트는 환자를 들어 올리기 위해 간병인이 환자의 몸을 돌려 시트를 깔아야 하는 번거로움이 있었다. 하지만 이번에 개발된 덩굴 로봇은 환자의 등 밑으로 부드럽게 파고들어 스스로 지지대를 형성하기 때문에, 간병인의 개입을 최소화하면서도 환자에게 편안함을 제공할 수 있다.
연구에 참여한 MIT 기계공학과 켄타로 바하이트 박사 과정 연구원은 “이 로봇은 간병인의 육체적 고충을 덜어주는 동시에 환자에게도 훨씬 부드럽고 편안한 이송 경험을 제공할 수 있다”고 말했다.
연구팀은 이 기술이 요양 분야를 넘어 다양한 산업군에 적용될 수 있을 것으로 내다봤다. 깨지기 쉬운 농작물을 수확하거나, 항만 및 창고에서 무거운 화물을 자동으로 적재하는 크레인 시스템 등에도 활용이 가능하다.
백승일 기자 [email protected]
https://www.irobotnews.com/news/articleView.html?idxno=43899
토토하이, 토토하이먹튀신고, 토토힌먹튀사이트, 토토하이먹튀검증사이트, 토토하이먹튀없는사이트, 토토먹튀, 먹튀토토, 토토하이먹튀예방, 토토하이먹튀제보, 토토하이먹튀확인, 토토하이먹튀이력조회, 먹튀피해, 토토하이먹튀검증업체, 토토하이먹튀사이트검증, 토토하이먹튀공유, 토토하이먹튀사이트목록, 토토하이먹튀리스트, 토토하이안전공원, 토토하이안전놀이터, 토토하이안전사이트, 토토하이검증사이트
Comments



 종목별 팀순위
종목별 팀순위
-
순위 팀 경기 승 무 패 승점 1  리버풀
리버풀
19 12 6 1 42 2  아스널
아스널
18 12 4 2 40 3  애스턴 빌라
애스턴 빌라
19 12 3 4 39 4  토트넘
토트넘
18 11 3 4 36 5  맨시티
맨시티
17 10 4 3 34 6  맨유
맨유
19 10 1 8 31 7  웨스트햄
웨스트햄
18 9 3 6 30 8  뉴캐슬
뉴캐슬
19 9 2 8 29 9  브라이튼
브라이튼
18 7 6 5 27 10  본머스
본머스
18 7 4 7 25 11  첼시
첼시
18 6 4 8 22 12  울버햄튼
울버햄튼
18 6 4 8 22 13  풀럼
풀럼
19 6 3 10 21 14  브렌트포드
브렌트포드
17 5 4 8 19 15  크리스탈 팰리스
크리스탈 팰리스
18 4 6 8 18 16  노팅엄 포레스트
노팅엄 포레스트
19 4 5 10 17 17  에버턴
에버턴
18 8 2 8 16 18  루턴
루턴
18 4 3 11 15 19  번리
번리
19 3 2 14 11 20  셰필드
셰필드
19 2 3 14 9
- 12.15 "34살 손흥민, 스피드 떨어지면 아무 것도 아냐!"…멕시코 희망회로 돌리네
- 12.15 충격 소송! "오타니, '부부의 관계' 폭로 될 것"...하와이 별장 관련 재판 장기화, "물밑 진흙탕 싸움"
- 12.15 '신태용 전 감독이 정승현 뺨 때리는 영상' 결국 공개됐다...축구팬 반응은 "저 장면이 폭행?" 갑론을박
- 12.15 “프로야구 24년 했는데 방출 한 마디로 끝, (KIA)섭섭했다” 임창용 7년전 심정토로…KBO가 은퇴식까지? 글쎄요
- 12.15 [속보] 파리 생제르맹 ‘오피셜’ 공식발표 떴다, 이강인 또또또또또또또또또 트로피 들어 올리기 위해 도하행 ‘FIFA 인터컨티넨탈컵 참가’
- 12.15 '압도적 1위 유출' KIA, 롯데와 트레이드 한 수 되나…"언제든지 빈틈 나면 간다"
- 12.15 韓 축구, 日 따돌렸나…3월 A매치 스코틀랜드는 일본과 확정적 → 홍명보호는 오스트리아와 대결 유력
 프리미엄카지노총판
프리미엄카지노총판 실버스틸
실버스틸 킹덤sms
킹덤sms 리딕션미
리딕션미